V5 旋轉感測器
簡介
V5 旋轉感測器 由 VEX 推出,過去 EDR 系統感測器是以三線類杜邦頭接孔的設計,現今推出感測器皆以智能接孔為主,可與 V5 機器人平臺完全整合。

V5 旋轉感測器主要可量測以下數值,提供機器人有更好的迴授控制:
- Rotational position(旋轉位置)
- Total rotations(總旋轉值)
- Rotation speed(轉速)
Rotational position:測量從 0° 到 360°,精度為 0.088。角度是絕對確定的,當機器人關閉電源或程式結束後不會遺失,重新啟動主機或程式依然保持原數值。
Total rotations:向前或向後旋轉的次數,可根據需要重置為零。當機器人關閉電源時,將無法儲存旋轉數值。
Rotation speed:由感測器以每秒量測角度。
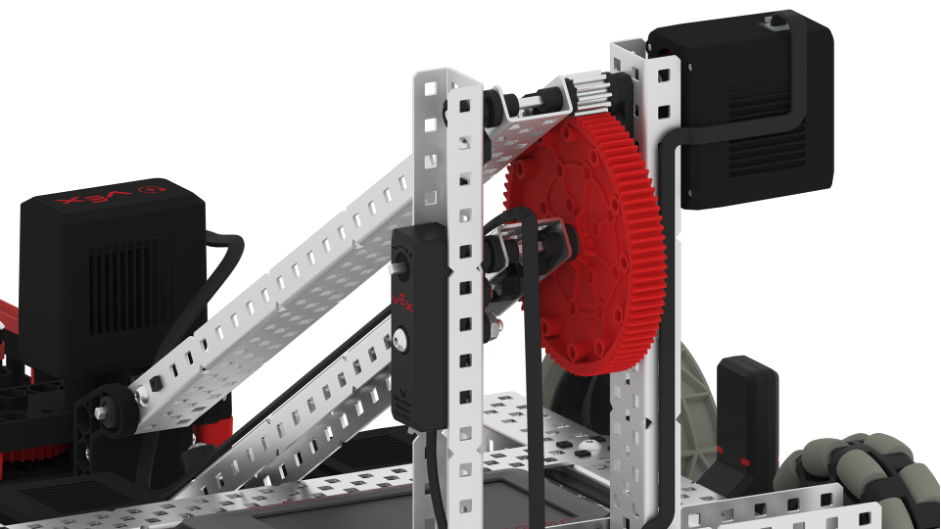
旋轉感應器可與 1/8 和 1/4 英寸 VEX金屬軸(Drive Shafts) 相容。感測器外殼有一個螺絲安裝孔,可使用 #8-32螺絲 安裝感測器。

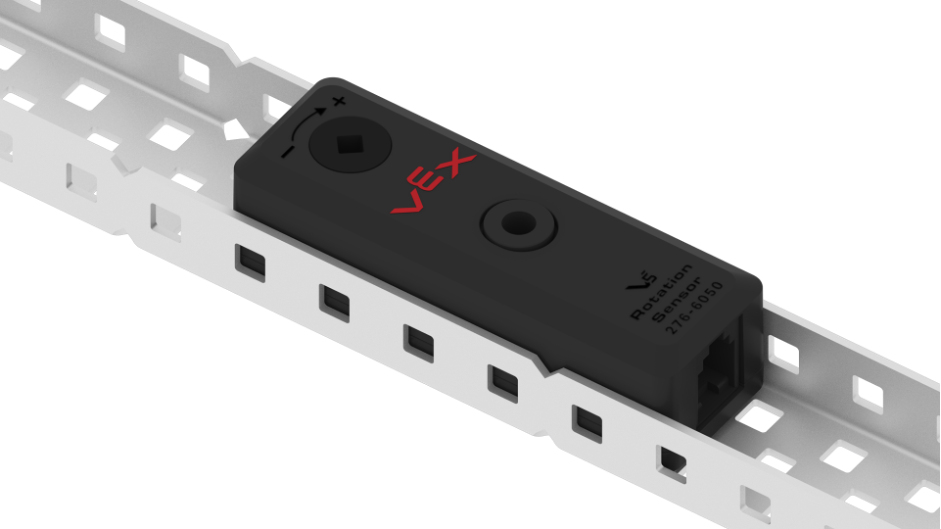
V5旋轉感測器 使用智能接孔,使用 V5 訊號線可連結 V5主機 上的任何一個智能接孔。

V5 旋轉感測器的工作原理
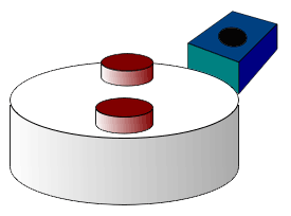
V5 旋轉感測器的旋轉軸集線器位置更改為電信號(使用霍爾效應感測器)註1。感應器內部電子元件將訊號轉換後輸出給 V5主機。
V5 旋轉感測器 即使 V5主機 電源關閉,仍然可記錄旋轉位置(從0到360度)。工作原理類似於電位計( 3-wire potentiometer )註2。然而,與電位計不同,V5 旋轉感測器 可以連續旋轉和測量許多軸旋轉,類似 光學旋轉編碼器 (3-wire Optical Shaft Encoder)註3。


V5 旋轉感測器 藉由程式編輯來讀取感測器數值,作為控制機器人行為的參考因素之一。
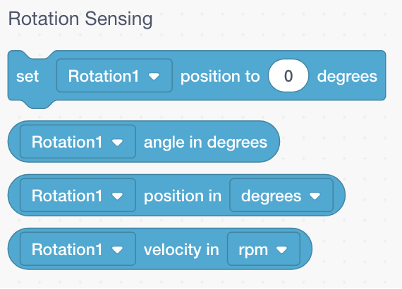
- 將 V5 旋轉感測器 的位置設置為指定度數,例如: 0 度。
- 絕對角度:選轉範圍介於 0 到 360 之間。
- 通過軸的轉動或軸的角度來測量位置。
- 以每秒度 (dps) 或每分鐘轉速 (rpm) 來測量軸速。

V5 旋轉感測器的設置
放置:V5 旋轉感測器 需要通過軸孔插入一個軸才能正常使用。請務必使用#8-32 螺釘將感測器安全地連接在安裝孔中。
讀取 V5旋轉感測器 值:使用 V5主機 中 Devices 內的(儀錶板)查看旋轉感測器讀取到的數值。可以參考以下步驟來讀取感測器數值:
- 打開V5的保護透明上蓋,打開 V5主機 並觸控Devices圖示。
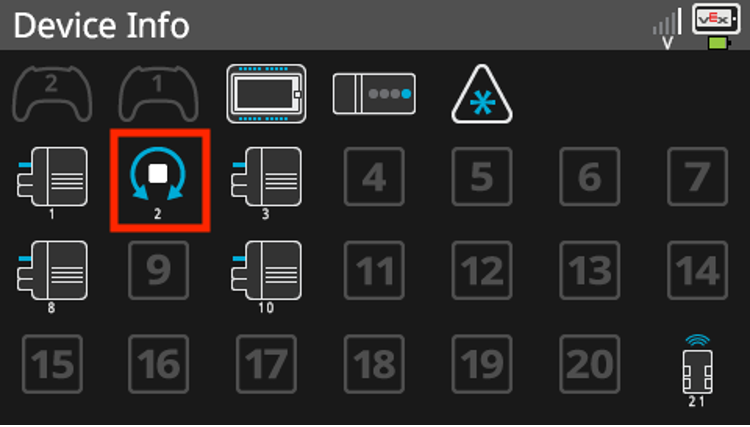
2. 選擇螢幕上 Device Info 中的 V5旋轉感測器圖示。
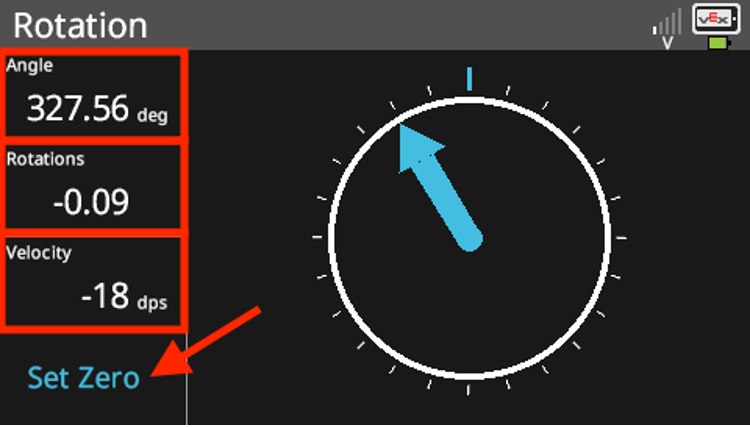
3. 旋轉感測器的設備資訊將顯示軸已轉動的角度、軸已轉動的旋轉量以及軸速(速度)。選擇帶有” Set Zero “的螢幕部分,將值重置為零。
注意:確保V5機器人主機有最新韌體版本
在 VEXcode V5 中添加旋轉感測器作為設備
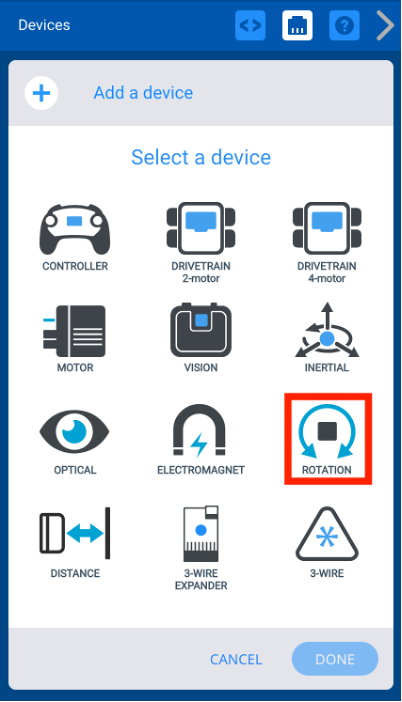
1.以下步驟將添加旋轉感測器作為 VEXcode V5 中的裝置:選擇裝置「圖示」。

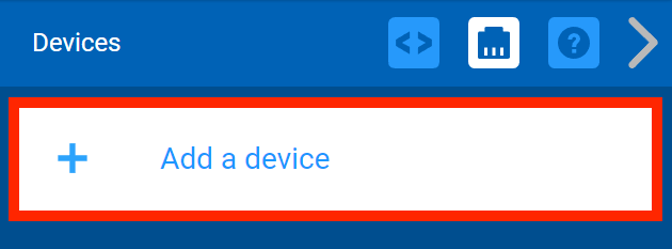
2.選擇”Add a device”
3. 選擇”ROTATION”。
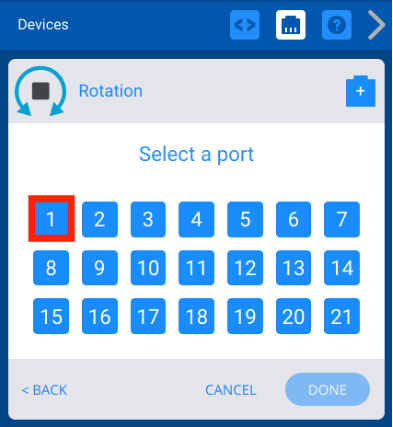
4. 選擇旋轉感測器插入 V5 機器人主機的智慧接孔。
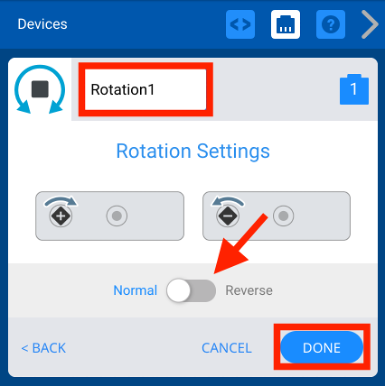
5.選擇接孔後重新命名或預設名稱,選擇”完成”。
當 V5旋轉感測器 添加到您的使用者程式中,一組新的感測器指令將可以使用。
注意:在儀錶板中設置 0 和在指令中設置 0 是有區別的。
旋轉感測器的常見用途
V5旋轉感測器 所量測的數值,可以用來調整機器人運動。
可從以下地方得到 V5旋轉感測器 的資訊及設置方式:
- 可使用 V5主機 上的「Device Info」選項。
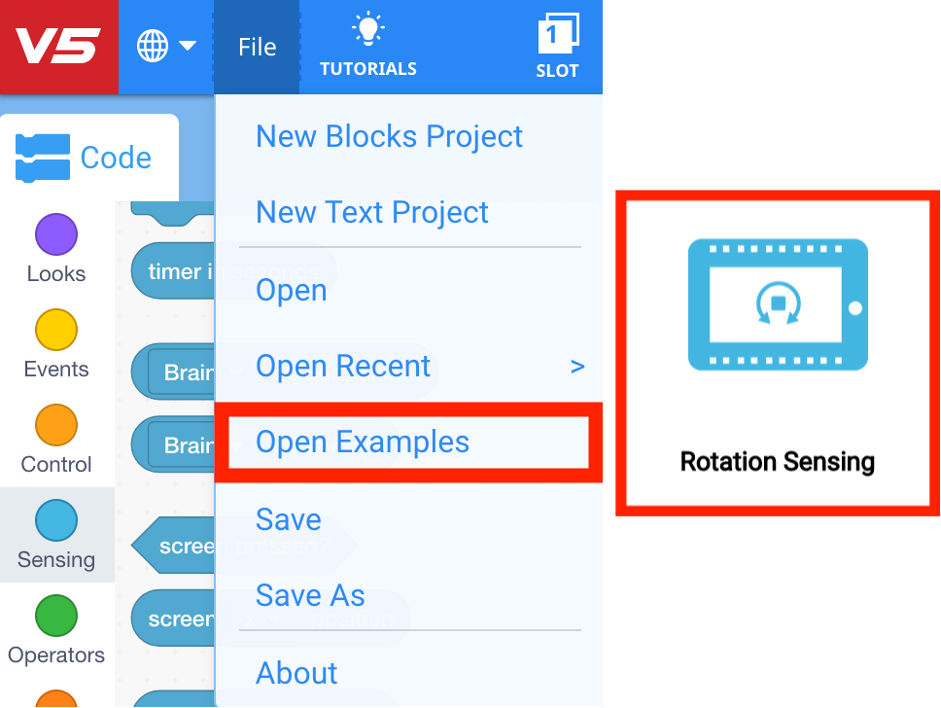
- 可使用 VEXcode V5 File 選單中的「Open Examples」選項中找到的範例專案「Rotation Sensing」。
- 可使用 VEXcode 程式中的自定義指令。
提供用途參考範例:
1. 控制位置:從 V5主機 能知道Clawbot的手臂的旋轉角度。
2. 輸入/輸出比讀數:可用於鏈輪和齒輪比率的研究。
使用於競賽場合
V5 旋轉感測器將為競爭機器人提供卓越的競爭優勢。測量軸角、位置和軸速的能力將為控制機器人的行為提供大量資訊。
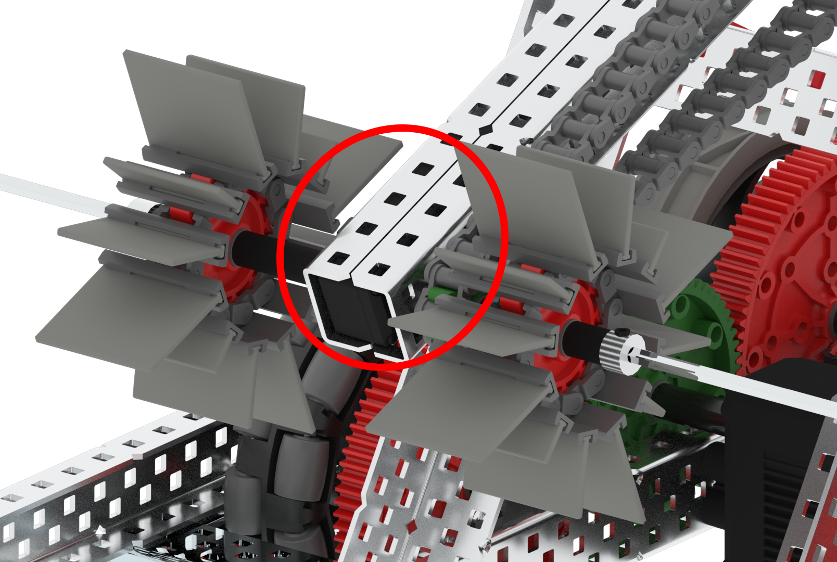
- 飛輪速度:非智能馬達驅動軸的飛輪可安裝,可直接量測到當前旋轉速度與角度。例如:使用鏈條帶動A、B兩端不同大小的鏈輪,A端鏈輪由馬達直接驅動,B端靠鍊條驅動鏈輪而旋轉。因鏈輪大小不一樣,所以鏈輪所旋轉速度及角度也會不一樣。A端可由馬達內部光學編碼器量測角度及速度,B端可加裝 V5 旋轉感測器直接量測B端鏈輪旋轉速度或角度。
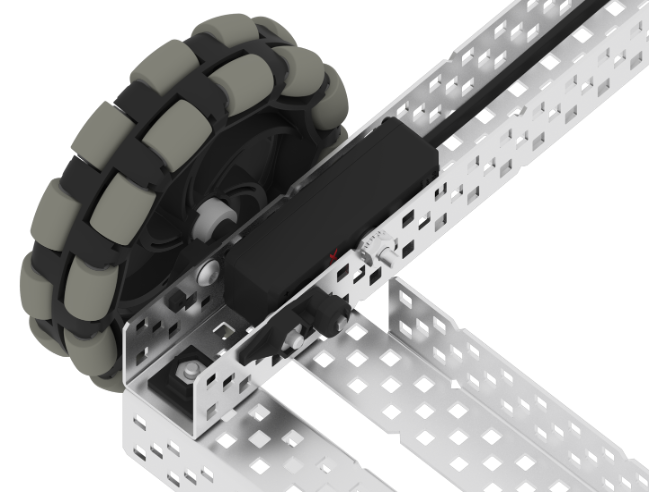
- 孤立的車輪/旋轉感測器:例如機器人需要推動遊戲道具,機器人可能會遇到驅動輪滑動情況。V5 智慧馬達驅動的車輪開始滑動,馬達內建 Encoder 的值就不再有效。在這種情況下,可以在機器人的底盤中添加一個帶旋轉感測器的獨立全向輪,以精確測量機器人的運動。建議使用橡皮筋或乳膠管組裝此車輪類似懸吊系統。此設計將允許測量輪與場面保持充分接觸,而無需將驅動輪從地板上抬起來。
- 競賽題目為例:在 2020 – 2021 VEX 機器人競賽遊戲中,”Change Up”可以將旋轉感測器放置在機器人手臂的軸上,並且可以程式設計為移動到塔柱頂部的確切高度以得分。